
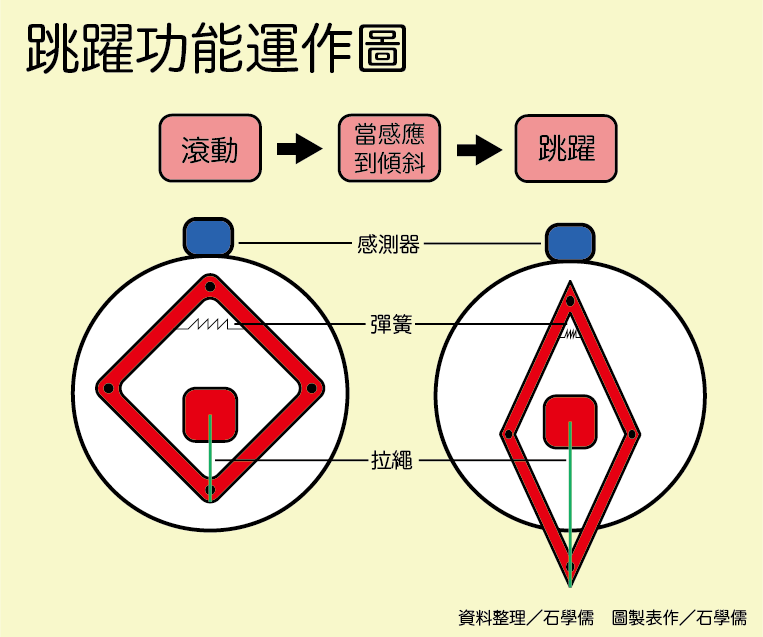
【記者石學儒綜合報導】地上快速滾動的球型機器人眼看就要撞到前方石塊,但這時它突然跳起,成功越過石頭。國立臺灣大學團隊「BiorolaBall」開發出「球型跳躍滾動複合式機器人」,讓球型機器人兼具滾動與跳躍的功能,解決傳統球型機器人無法跨越隆起地面障礙物的限制,此作品也獲得「萬潤2020創意創新競賽」金牌獎的肯定。

傳統球型機器因為具高機動性和低故障率的優點,常被應用於陪伴、探勘等領域,但在行進時卻難以跨越障礙物,團隊成員、臺大機械工程學系張維哲說明,一般球型機器人只能跨越其半徑1/5的障礙物。為解決此問題,團隊將球型機器人分為兩部分,一是裝有馬達的兩個半球,使球型機器人可以滾動;二為中心跳躍機構,透過儲存能量的機構,以及模仿青蛙跳姿的四連桿結構兩者互相作用,讓球型機器人能夠跳躍,且跳躍高度平均可達機器人半徑的兩倍。
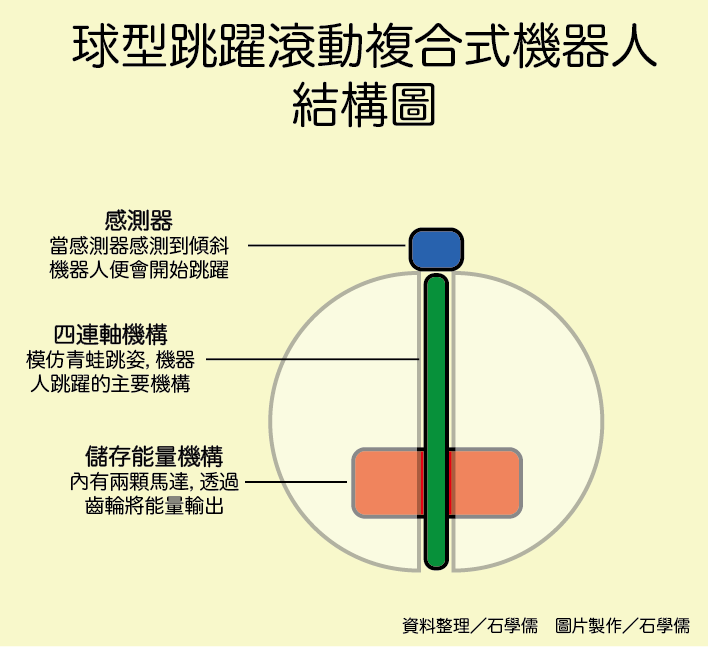
其中,四連桿結構藉由擠壓的方式,向平面產生力,如同游泳時蹬牆前進,使機器人能夠跳躍。團隊成員、臺大機械系張芝綾補充,下方接觸地面的零件具弧形外觀、軟材質轉軸等設計,可延長與地面的接觸時間,以提高機器人的跳躍能力。然而開發困難在於儲存能量的機構,團隊解釋,他們以中心彈簧儲存能量,並透過齒輪傳送動能,但曾多次因為設計不夠縝密,導致機器人斷裂或解體,經過反覆嘗試不同材料和構造,才有現在的成果。

張維哲表示,雖然目前市面上有可微幅離開地面的球型機器人,但因離地的距離不足,未能解決傳統球型機器人的困境。同時,也有軟性、可變外形的球型機器人,但由於表面柔軟,其滾動速度並不快,且亦無法跨越垂直或過高的障礙物。此外,跳躍功能還能應付凹陷路段,如水溝等。
團隊利用跳躍技術,可望改善球型機器人的機動性,比如應用於陪伴型球型機器人,可使機器人在家中能爬樓梯或是跨越較高的門檻。張維哲補充說:「在探勘和救災也是可以使用,因為球型機器人球型的設計,讓內部零件不易損壞。」再加入跳躍功能後,不論是深溝或是高聳的障礙物都能越過,且團隊開發的機器人每次跳躍間隔為一秒,能夠更有效率地完成任務。
針對此研發,台北市消防隊員何小明(化名)表示,他樂見具跳躍性能的球型機器人出現,但若要實際用於救災,還必須經過多項測試。民眾李沁玹也提出,該發明可能只適合特定的環境,像是太高溫的環境恐導致機體故障。不過,張維哲說明,未來將加入環境感測器,幫助機器人更準確地預知跳躍時機,同時也會改良內部構造,讓更小型的球型機器人能夠被生產。
