【記者陳卓希綜合報導】機器人不只有冰冷的金屬材質,近年興起的軟性機器人,讓機械手臂擁有人類皮膚的觸感,動作也更加細膩。國立臺灣大學機械工程學系團隊,以抽氣方式驅動機械手指,增加軟性手指的抓握力,研發出「抽氣式薄壁挫屈軟性材料手指」,可望用於醫療和食品包裝等領域。此作品在「萬潤2020創新創意競賽」獲「最佳應用獎」。
團隊成員、臺大機械系學生于紹尹表示,一般軟性手指多由充氣方式驅動,原理類似氣球充氣,氣體會使手指膨脹具抓握力,但因空氣具壓縮性,如同氣球充氣後表面仍具彈性,會導致握力變小而不易取物,抓力比值落在2到68。有鑑於此,團隊改用「抽氣式」驅動手指,「可想像成真空包裝的綠豆,抽掉空氣後袋子會變硬。」他形容,抽氣後的關節能更穩固,也讓軟性手指的勁度(註1)大增,抓握力較充氣式手指高,比值接近80。
註1:勁度是彈性材質抵抗變形的一種強度標準。

軟性手指總重為50公克,可抓取超過4公斤的物品,且因為材質柔軟,可大幅降低被抓取物損害的可能性。 圖/歐陽智文提供
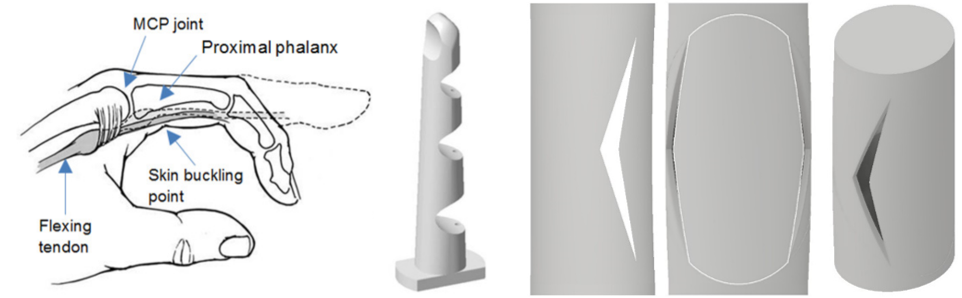
左為手指彎曲型態概念圖,中間為仿生手指結構,右則為本作品設計的手指關節。 圖/歐陽智文提供
註2:透過模仿生物系統的功能和行為,研發技術系統。
大部分硬式機器人多透過金屬製成和馬達發動,有足夠抓力抓取重物,被廣泛應用於工業領域,但缺點為無法抓取會變形的物體。指導教授莊嘉揚認為,團隊的作品打破限制,具高度適應性,可抓握較薄和不規則的物品,如信用卡和絨毛娃娃等。他說明,像食品包裝和醫療領域,機器「柔軟」的特性能更接近人體的感知能力,以適應不規則形狀的商品。
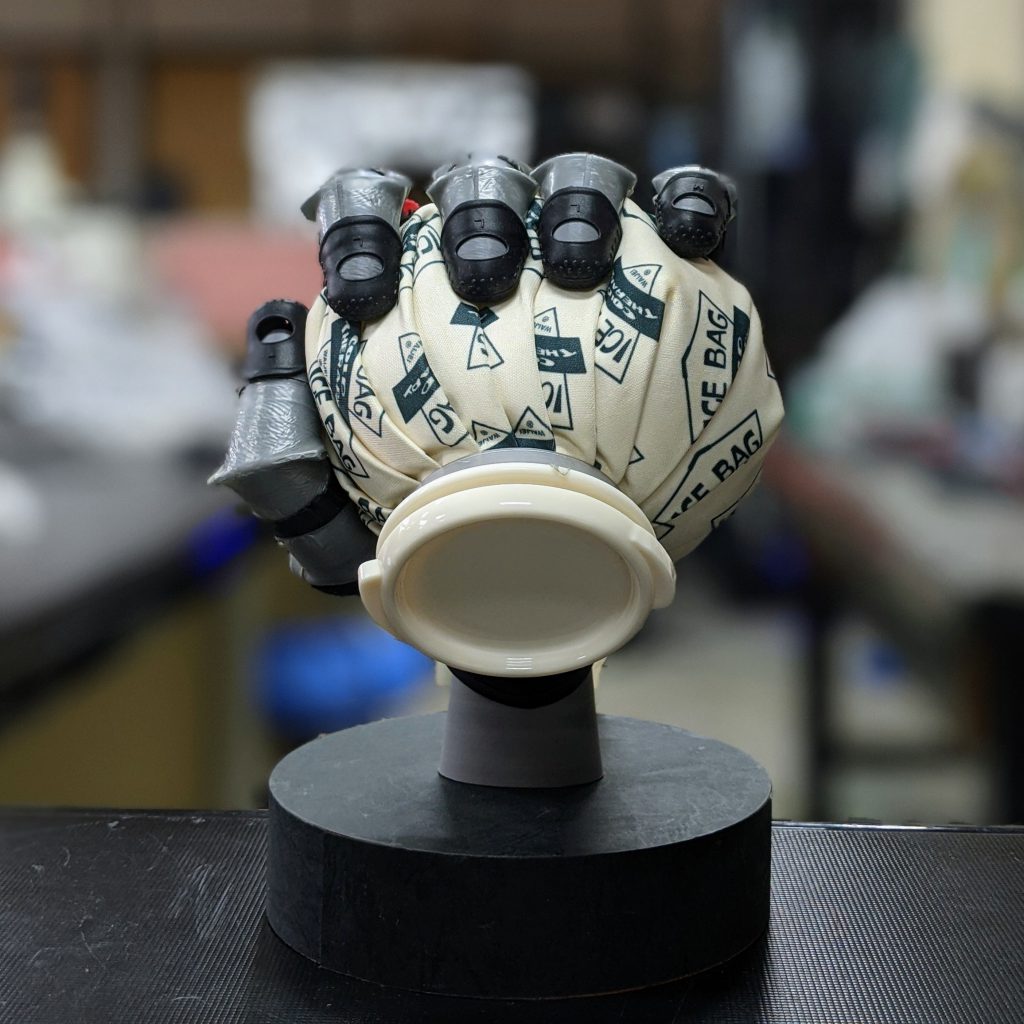
團隊製作的仿真手指,可抓握不同形體物品,像圖中裝水的冰袋,展現高度適應能力。 圖/歐陽智文提供

團隊將關節依人類手指樣態進行排列,使其外觀與手掌相似,可抓取體積小、厚度薄的物件。 圖/歐陽智文提供
