【記者李雨羲綜合報導】無人機目前已被廣泛使用於不同領域,近年來各界也積極研究,如何將其妥善運用於急難救助上。慈濟大學醫學資訊學系學生團隊設計一款「智慧型無人機人體偵測與物聯網手套控制系統設計」,透過手勢動作操作,希望可以讓它更有效率地參與救災現場。
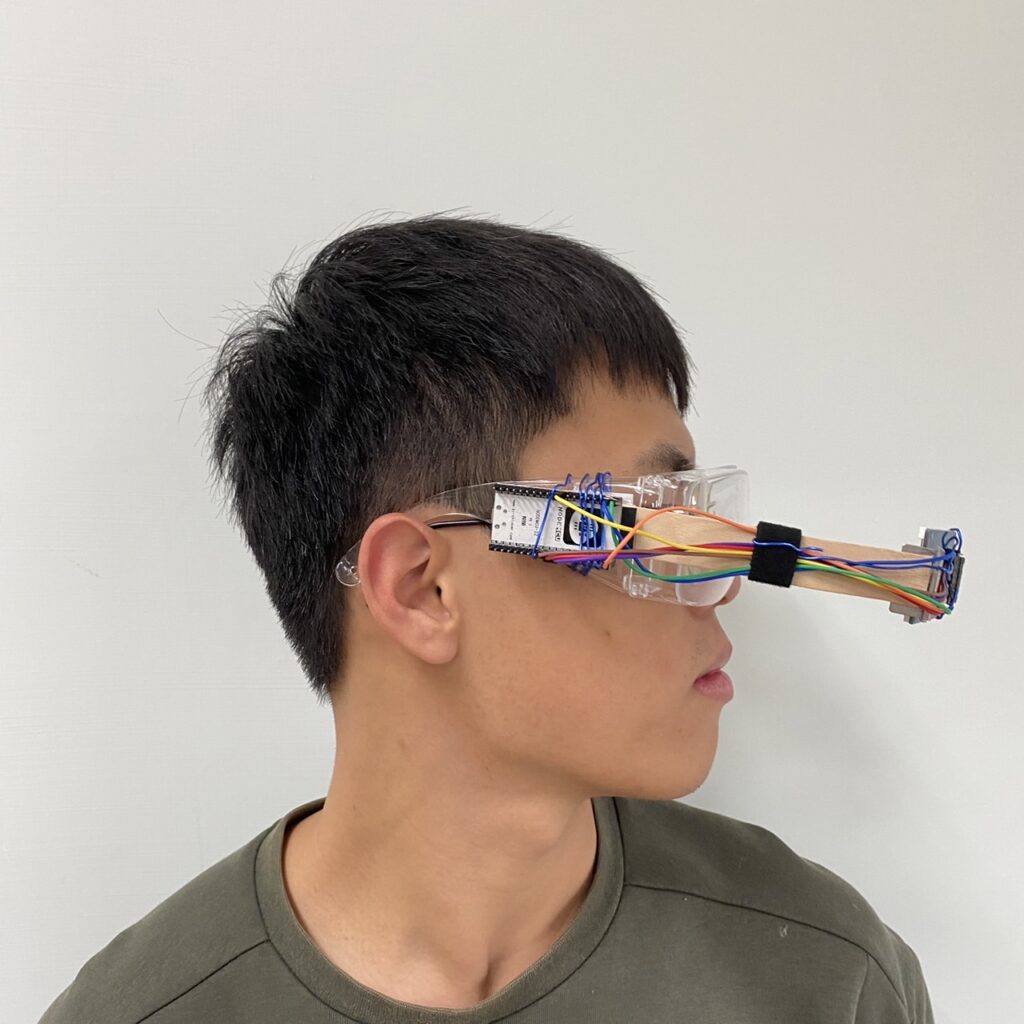
使用者可透過配戴護目鏡,藉著前方所裝設的螢幕,查看AI判斷過後的無人機鏡頭視角。 圖/李兆珩提供

使用者可透過手套上開發板的狀態燈判斷現下飛行機的操作模式,綠、藍、紅分別代表了飛行、滯空及降落模式。 圖/李兆珩提供

使用者可透過八種不同的手部動作操作無人機的行動,以手掌攤平下壓為例,則是控制無人機向前飛行。 圖/李兆珩提供
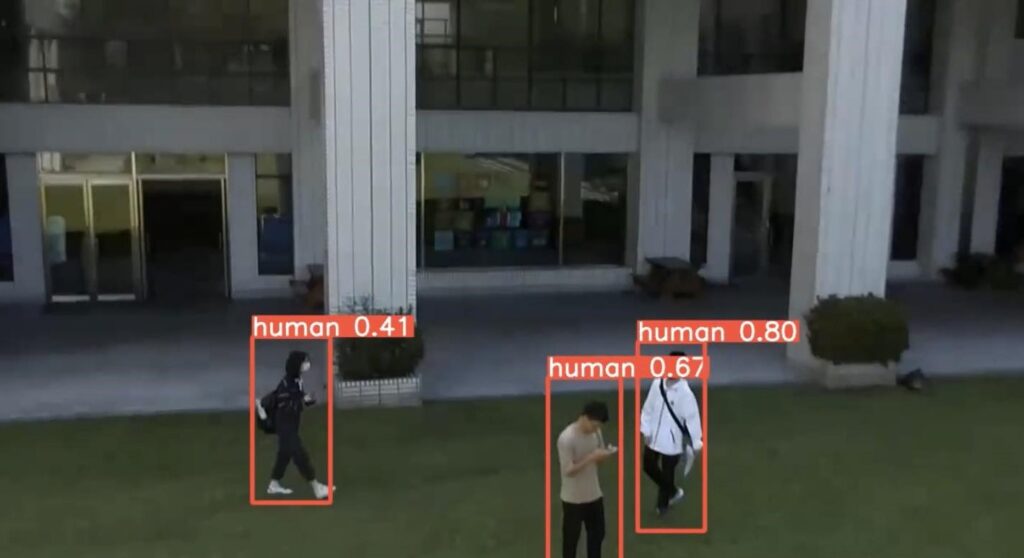
圖為AI判讀過後的畫面,將其判斷可能為人類的物體框起,並在一旁標明數據可信度。 圖/李兆珩提供
