【記者石學儒綜合報導】地上快速滾動的球型機器人眼看就要撞到前方石塊,但這時它突然跳起,成功越過石頭。國立臺灣大學團隊「BiorolaBall」開發出「球型跳躍滾動複合式機器人」,讓球型機器人兼具滾動與跳躍的功能,解決傳統球型機器人無法跨越隆起地面障礙物的限制,此作品也獲得「萬潤2020創意創新競賽」金牌獎的肯定。

團隊以「球型跳躍滾動複合式機器人」於「萬潤2020創意創新競賽」獲得不分組金牌,是該競賽的最大獎。 圖/張維哲提供
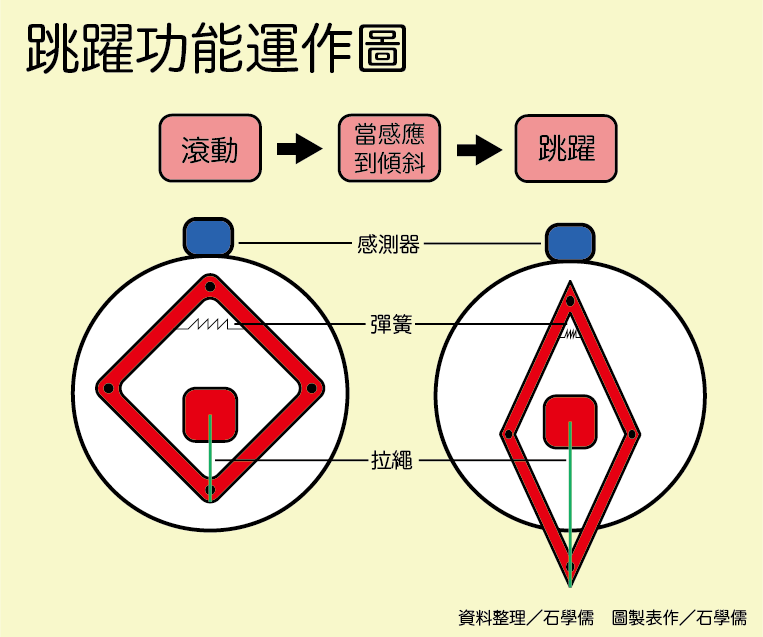
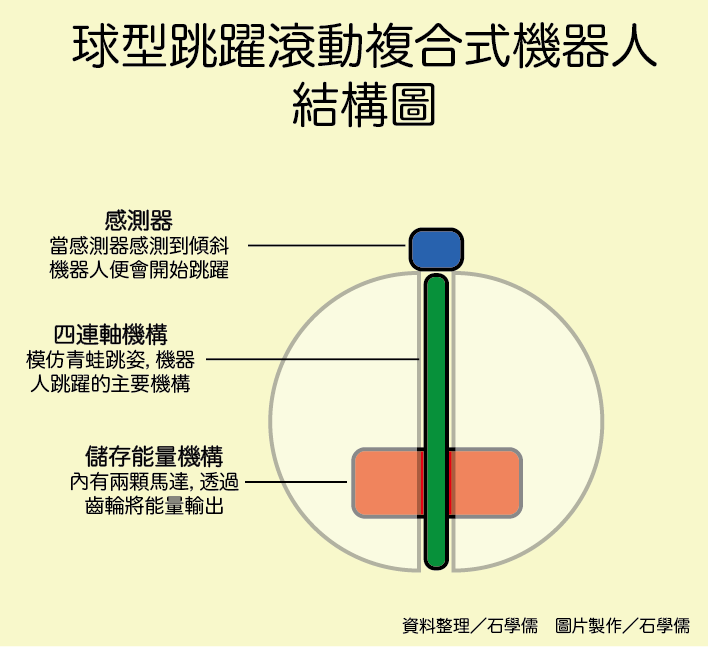 其中,四連桿結構藉由擠壓的方式,向平面產生力,如同游泳時蹬牆前進,使機器人能夠跳躍。團隊成員、臺大機械系張芝綾補充,下方接觸地面的零件具弧形外觀、軟材質轉軸等設計,可延長與地面的接觸時間,以提高機器人的跳躍能力。然而開發困難在於儲存能量的機構,團隊解釋,他們以中心彈簧儲存能量,並透過齒輪傳送動能,但曾多次因為設計不夠縝密,導致機器人斷裂或解體,經過反覆嘗試不同材料和構造,才有現在的成果。
其中,四連桿結構藉由擠壓的方式,向平面產生力,如同游泳時蹬牆前進,使機器人能夠跳躍。團隊成員、臺大機械系張芝綾補充,下方接觸地面的零件具弧形外觀、軟材質轉軸等設計,可延長與地面的接觸時間,以提高機器人的跳躍能力。然而開發困難在於儲存能量的機構,團隊解釋,他們以中心彈簧儲存能量,並透過齒輪傳送動能,但曾多次因為設計不夠縝密,導致機器人斷裂或解體,經過反覆嘗試不同材料和構造,才有現在的成果。

團隊經歷多次嘗試改良,才有現在的成果,圖中白色的半球殼在測試時留下許多撞痕。 圖/張維哲提供

團隊研發出有跳躍功能的球型機器人,突破球型機器人移動時對地形的限制,過去窒礙難行的路,現在猶如平地般易行。 圖/張維哲提供
